Mask R-CNN 概述
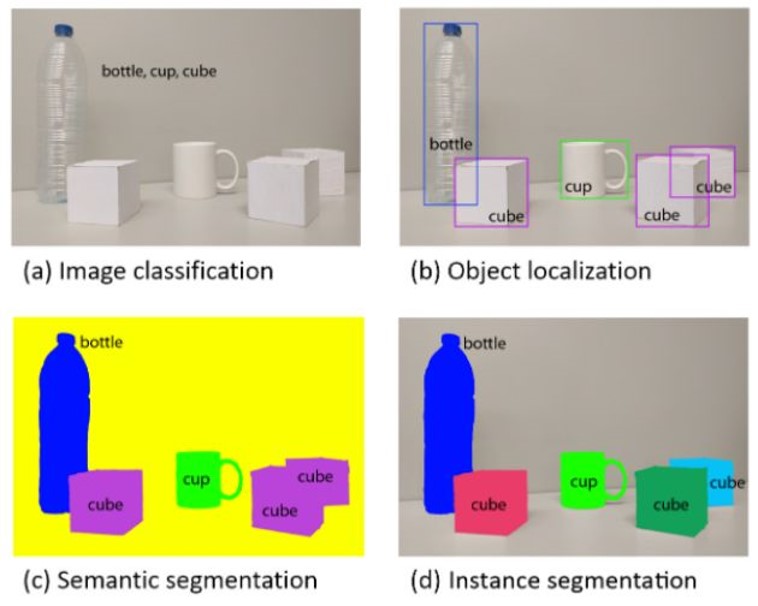
实例分割 vs 语义分割
实例分割和语义分割是计算机视觉中两种不同的图像分割任务。
实例分割:识别并分割图像中的每个单独物体,为每个实例分配唯一标识符。
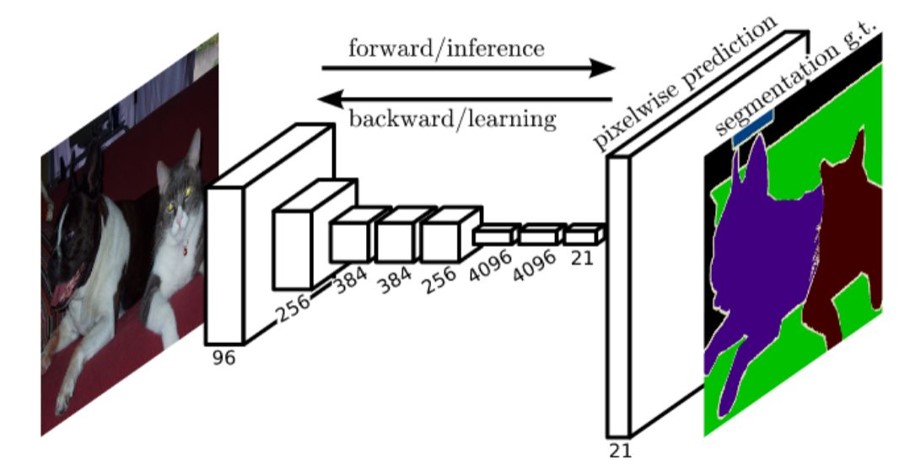
语义分割:将图像分割为具有相似语义含义的区域,将每个像素分配给预定义的类别而不区分个体实例。
Mask R-CNN的主要步骤
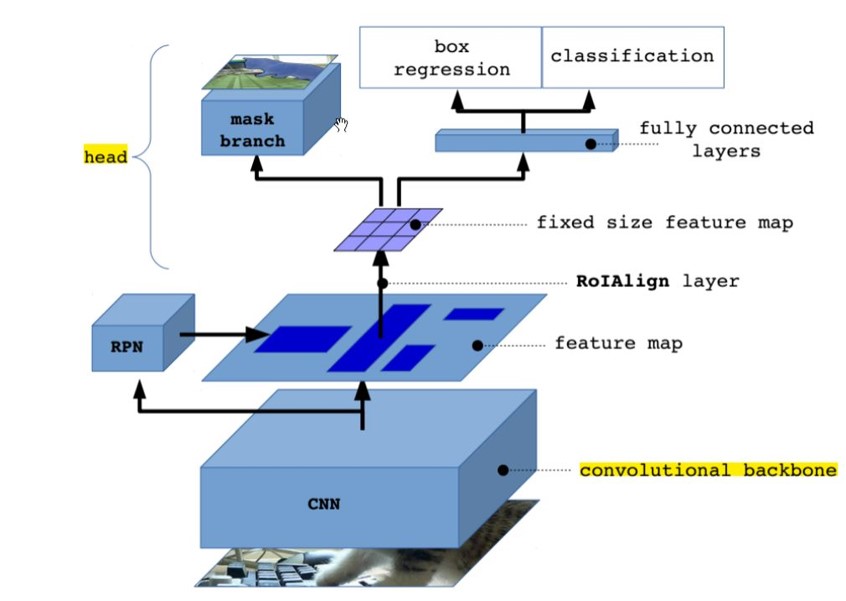
第一阶段 – 区域提议生成:
- 图像扫描:卷积操作从输入图像中提取特征。
- 区域提议生成:利用提取的特征图,通过区域提议网络(RPN)生成可能包含目标的区域提议。
第二阶段 – 目标分类、边界框回归和掩膜生成:
- ROI池化:从输入图像中提取与区域提议对应的特征,通过ROI池化将每个区域提议映射到固定大小的特征图。
- 目标分类和边界框回归:将提取的特征输入分类分支和边界框回归分支,分别预测目标的类别和边界框位置。
- 二值掩膜生成:引入全卷积网络(FCN)分支,为每个区域提议生成二值掩膜,说明像素是否属于目标。
Mask R-CNN的优缺点
优点:
- 精确的实例分割:能够以像素级别准确分割图像中的目标实例。
- 多任务学习:同时处理目标检测、分类和实例分割,通过多任务学习更全面地理解图像内容。
- 区域提议网络(RPN):有效生成候选目标区域,降低计算复杂性。
- 端到端训练:支持端到端训练,在不同任务上取得更好的性能。
缺点:
- 计算复杂度较高:特别是在实例分割时,计算复杂度较高,可能导致较长的推理时间。
- 大量标注数据:对于训练需要大量标注数据,尤其是对于实例分割任务。
- 处理小目标的挑战:在处理小目标时可能存在挑战,因为分辨率限制可能导致小目标的像素级分割不够精确。
- 模型复杂性:由于引入了多个分支和任务,模型复杂性较高,可能需要更多计算资源和内存。
发表回复